学习留下评论 [科研跟踪]MetaDriverse X UCLA组 dongshengye 2024年11月15日, 下午5:26 2024年11月15日 研究组名称是MetaDriverse,是加州大学洛杉矶分校的。对其研究内容进行一个跟踪。 #实验室 #科研跟踪
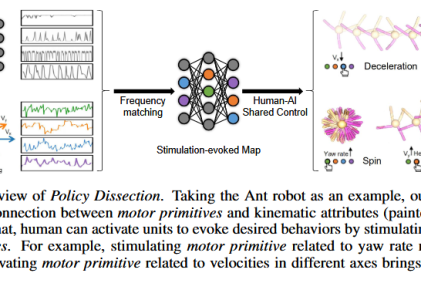
学习留下评论 Human-AI Shared Control via Policy Dissection dongshengye 2024年11月15日, 下午5:00 2024年11月15日 这篇论文是人和ai的share control,讲的是如何在训练好的模型中,无需训练就引入人类控制,实现方案是根据人类的指令直接控制这些神经元的激活值。 #人机共治 #神经学 #论文
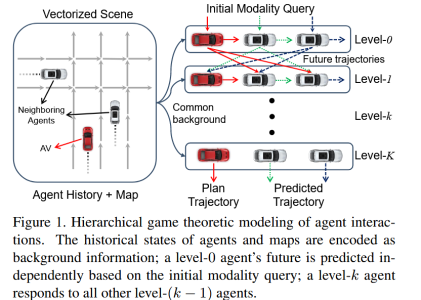
学习留下评论 GameFormer:基于博弈论和transformer的决策规划统一方法 dongshengye 2024年11月15日, 下午4:56 2024年11月15日 一个基于博弈论和transformer的决策规划统一框架。 #动作规划 #博弈论 #智能驾驶 #论文
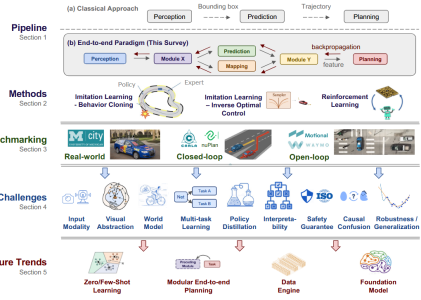
学习留下评论 综述:End-to-end Autonomous Driving: Challenges and Frontiers dongshengye 2024年11月11日, 下午7:34 2024年11月11日 arXiv:https://arxiv.org/a … #智能驾驶 #端到端 #论文
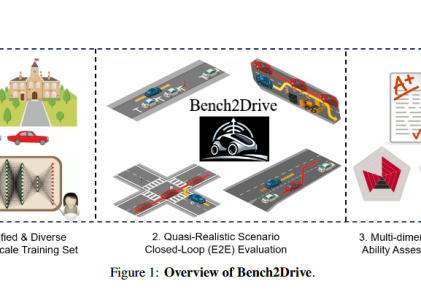
学习留下评论 Bench2Drive:端到端自动驾驶闭环多能力测试基准 dongshengye 2024年11月6日, 下午4:11 2024年11月11日 一个在carla v2中的多能力基准,并且实现了多个先进的sota算法,使用了think2drive的专家模型。 #智能驾驶 #深度学习 #端到端 #论文
学习留下评论 Think2Drive:基于世界模型的端到端强化学习方案。 dongshengye 2024年11月6日, 下午4:07 2024年11月6日 关键词:Autonomous driving · … #智能驾驶 #深度学习 #端到端 #论文
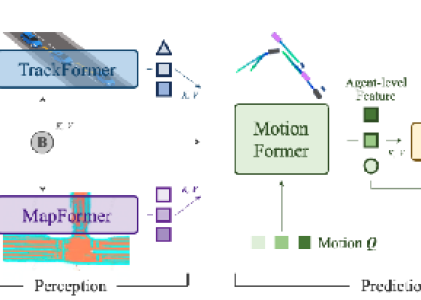
学习留下评论 UniAD:端到端自动驾驶的里程碑 dongshengye 2024年11月1日, 下午1:26 2024年11月11日 作为一个刚接触智驾的小白,在阅读了一系列论文并且收 … #智能驾驶 #深度学习
学习留下评论 对车辆规划与控制方法的探究 dongshengye 2024年10月18日, 下午8:12 2024年10月20日 在不久之前,利用Optimal trajector … #动作规划 #智能驾驶