
1. 研究领域:自动驾驶中的强化学习与决策规划
这些论文主要围绕自动驾驶系统中的 强化学习、决策规划 等方面,提升自动驾驶在环境中的智能决策和规划能力。
2. 主要问题:
- 高效学习:如何通过强化学习快速、高效地训练自动驾驶代理,减少对环境交互的需求。
- 多任务与多能力评估:如何评估自动驾驶系统在多场景和多任务中的表现,以及如何让系统适应不同能力的要求。
以上两点主要还是端到端的内容
- 交互与协同决策:如何处理自动驾驶车辆与其他交通主体的互动问题,尤其是在博弈环境中的决策与规划。(GameFormer)
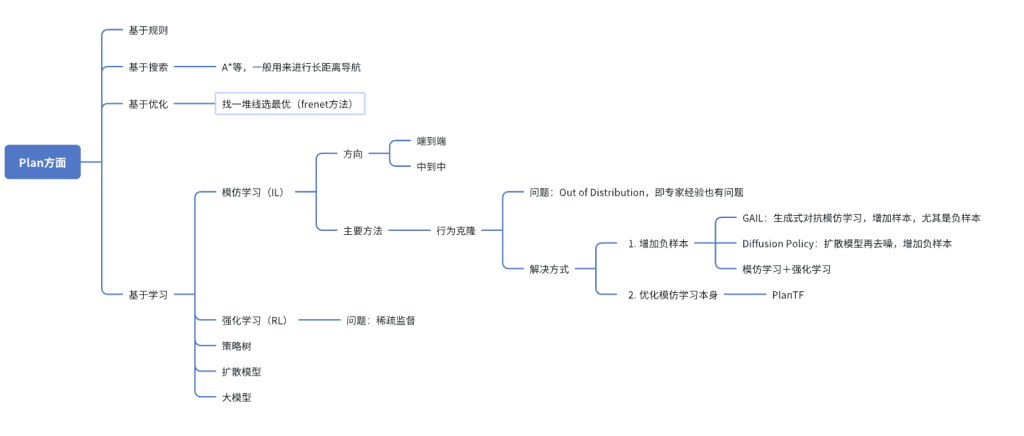
- 模仿学习与规划优化:如何利用人类驾驶员的行为进行模仿学习,优化自动驾驶规划器的决策过程。(主要内容)
3. 当前方法与关键技术:
顺序按照阅读和分享的时间顺序来的,董胜烨这里有列表。
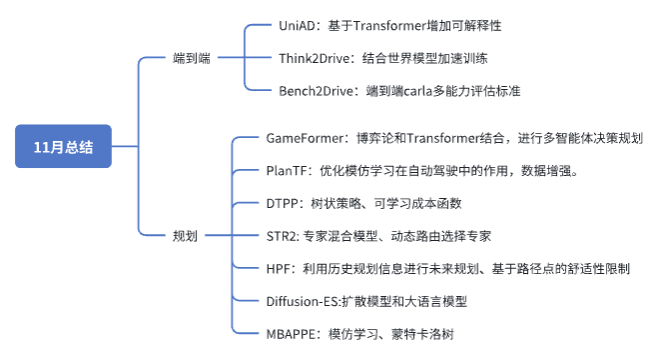
(1)强化学习与潜在世界模型(Think2Drive)
- 方法:提出结合 潜在世界模型 的强化学习方法,通过内在模型的预测能力来提高学习效率,减少对环境交互的需求。
- 技术点:强化学习、潜在世界模型、环境模拟。
(2)多能力评估(Bench2Drive)
- 方法:提出了一个 多任务评估基准(Bench2Drive),用于全面评估自动驾驶系统在多任务、多场景下的表现。
- 技术点:多任务学习、闭环评估、多能力基准。
(3)端到端自动驾驶的挑战(End-to-end Autonomous Driving)
- 方法:讨论端到端自动驾驶的各种挑战,尤其是在 感知、规划与控制 集成方面的困难,以及如何克服这些障碍以提高系统的表现。
- 技术点:端到端学习、深度学习、系统集成。
以上是端到端学习的内容
(4)博弈论与交互决策(GameFormer)
- 方法:提出 GameFormer,将 博弈论 与基于 Transformer 的预测和规划方法结合,处理自动驾驶系统与其他交通主体的交互决策。
- 技术点:博弈论、Transformer、交互式预测、协同规划。
(5)模仿学习与规划优化(PlanTF)
- 方法:提出对传统模仿学习方法的重新思考,聚焦 基于模仿学习的规划优化,提升自动驾驶系统的规划精度。
- 技术点:模仿学习、路径规划、行为克隆。
- 这是接下来要实现的一个方法。
(6)树状策略规划与成本评估(DTPP)
- 方法:提出 差异化联合条件预测与成本评估 方法,应用于 树状策略规划,优化自动驾驶决策过程。
- 技术点:树状策略、差异化学习、成本评估。
(7)专家混合模型与运动规划(STR2:Generalizing Motion Planners)
- 方法:通过 专家混合模型 泛化运动规划器,使系统能够根据不同的环境选择最佳规划策略。
- 技术点:专家混合模型、自适应运动规划、环境适应性。
(8)历史回顾与未来规划(HPF)
- 方法:提出 历史回顾与未来规划(HPF) 方法,通过回顾历史信息来优化未来的决策与路径规划。
- 技术点:历史信息、未来规划、路径优化。
4. 关键技术点总结:
- 强化学习与潜在模型:提高训练效率并减少对环境交互的需求。
- 博弈论与交互决策:处理多主体交互和协同决策,优化多方利益。
- 模仿学习与规划:通过学习专家行为提高自动驾驶系统的规划能力。(这是本月阅读之后决定选择的科研方向。)
- 多任务与多能力评估:针对自动驾驶系统的多任务和多场景应用进行全面评估。
- 树状规划与成本评估:在决策过程中实时评估不同路径的成本和风险。